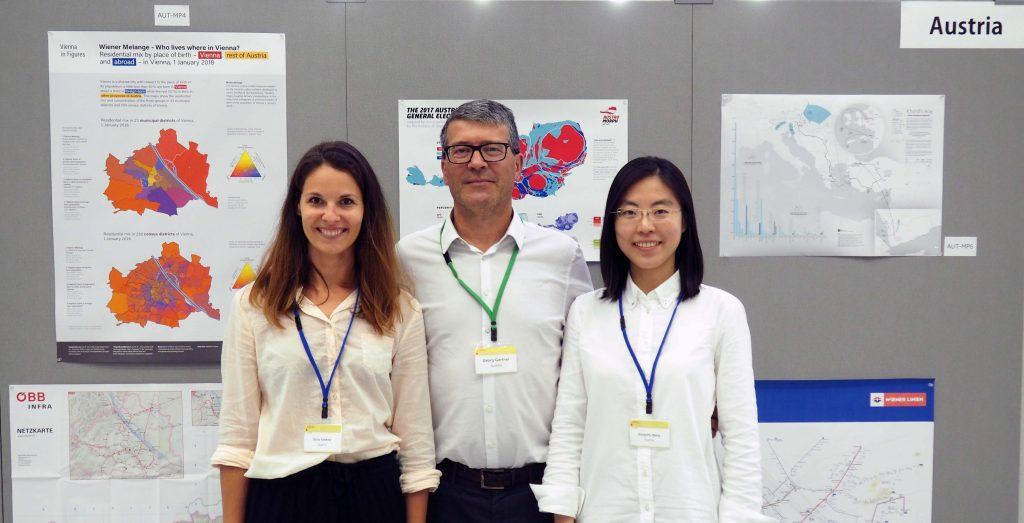
The Austrian national radio station Ö1 joined LBS2019 to capture the latest developments and ongoing research on Location Based Services: “Die Tücken der elektronischen Karten – Wie GPS die Welt(sicht) verändert” (starting at 19:18) is available in German until 29.11.2019, with interviews with Gartner Gartner, Georg Molzer, and Anita Graser.
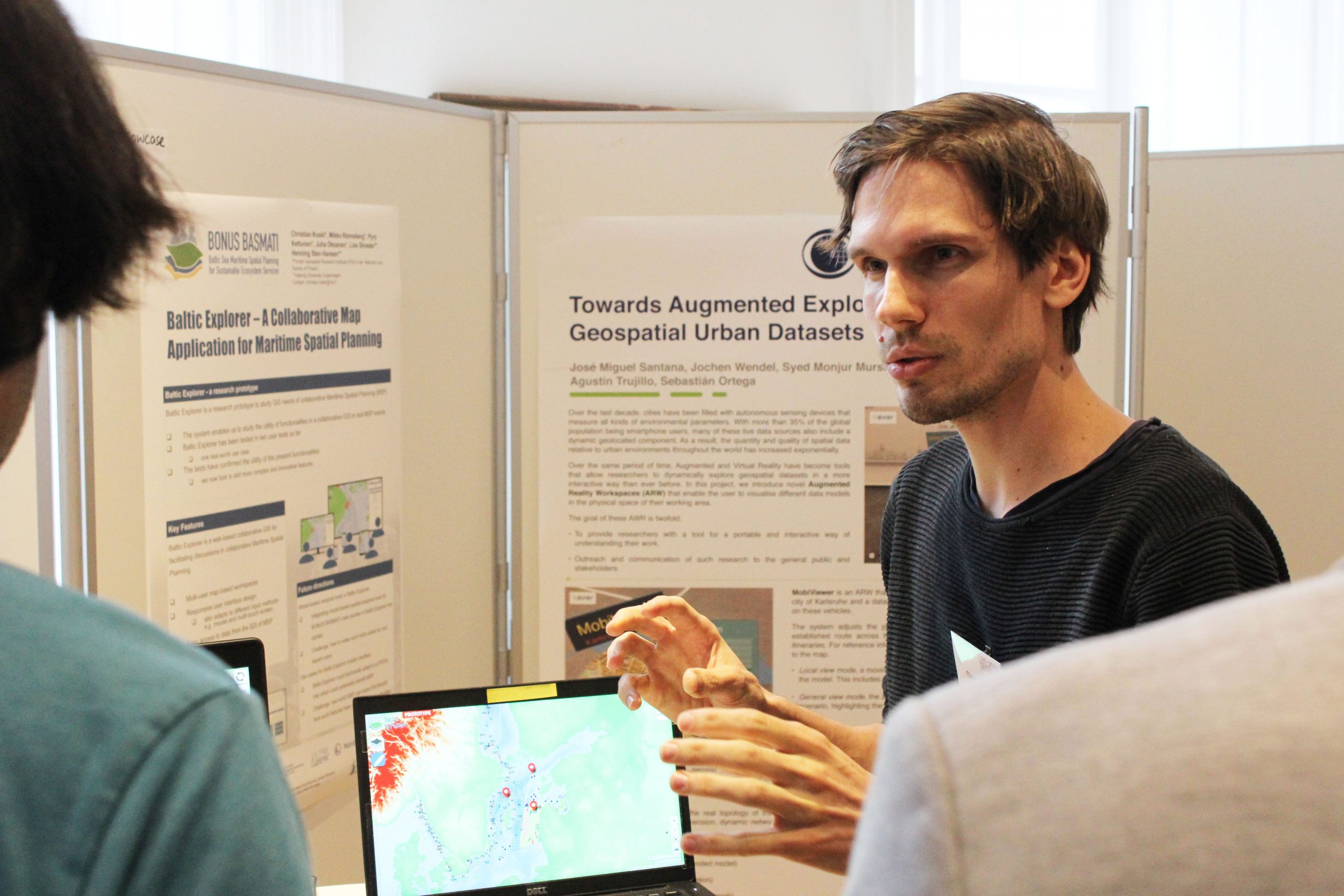
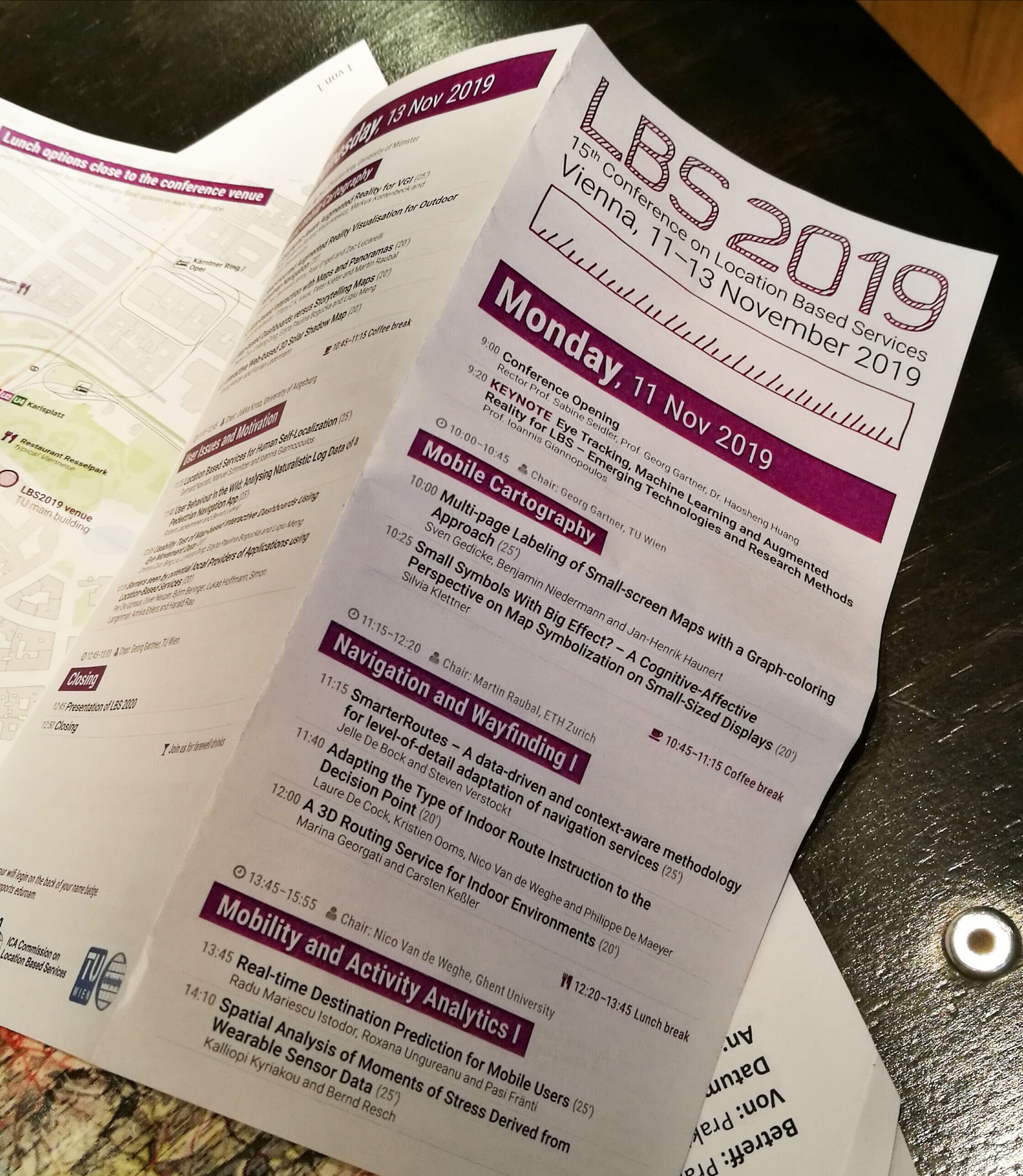
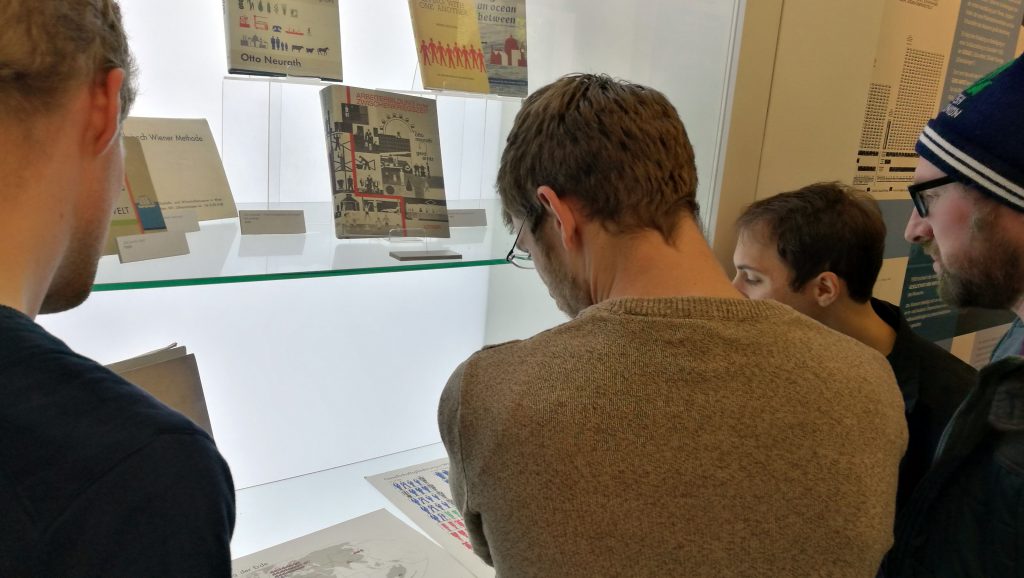
For centuries, humans used maps to orientate themselves by land, by sea or to find their way. Nowadays, Location-Based Services are capable to provide such – and much more – information tailored to the users’ contexts. Last week, the international conference LBS2019 took place in Vienna to discuss ongoing research, projects, and challenges.